
Đã từng có ứng dụng chạy trên robot Xiaomi liên tục upload bản đồ theo thời gian thực cho HASS. Tuy nhiên do hạn chế về bộ nhớ và năng lực xử lý nên robot liên tục bị lỗi và khởi động lại.
Sau này, các dự án tạo bản đồ thời gian thực cho HASS đều chỉ lấy thông tin trạng thái của robot Xiaomi và tự vẽ đường đi nhờ vào máy tính chạy HASS. Vì vậy các dự án nào yêu cầu chép gì vào robot đều phải tránh không dùng.
ICantBelieveItsNotValetudo là một dự án tạo bản đồ thời gian thực, đã được tạo thành add-on cho Hass.io nên rất dễ dùng.

Vào Hass.io – Add-on Store – Add New Repository by URL, điền địa chỉ https://github.com/Poeschl/Hassio-Addons, bấm Add.
Cuộn xuống dưới, chọn cài đặt ICantBelieveItsNotValetudo. Về cấu hình, chỉ cần điền “broker_url”: “mqtt://USER:PASSWORD@IP_MQTT_SERVER”, trong đó MQTT_SERVER thường là máy Hass.io
[START] và xem bản đồ thời gian thực của robot tại [OPEN WEB UI]
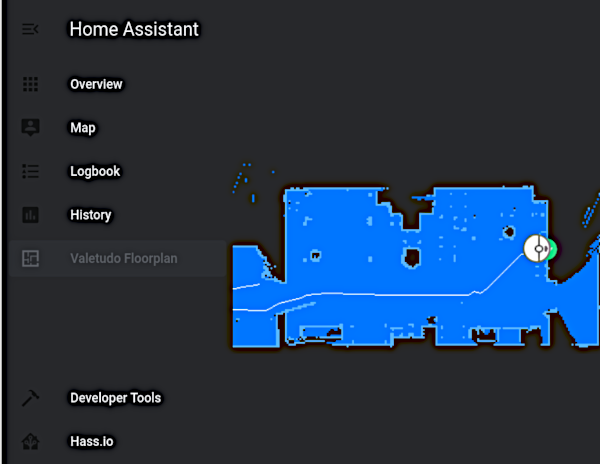
Nhờ vào MQTT, ứng dụng liên lạc được với robot để lấy thông tin cần thiết để dựng bản đồ cho Hass.io. Trước hết là tải về bản đồ sàn và toạ độ dock sạc, hay vị trí ban đầu. Sau đó mỗi 1 hay 2 giây lấy về thông tin cập nhật của robot để vẽ đường đi theo thời gian thực.
Thay vì tải về bản đồ sàn, có ứng dụng cho phép tự vẽ bản đồ sàn (dựa theo bản đồ sàn của robot) cho đẹp và dùng nó làm nền để vẽ đường đi của robot.
Nếu Hass.io chạy trên RPi 3B+, có vẻ hơi đuối nếu Hass phải hiển thị hình ảnh cả camera và bản đồ thời gian thực của robot, vì vậy không cần tạo iframe để bản đồ luôn xuất hiện trên giao diện Hass.io